Dacă te-ai uitat la imagini HiRISE de înaltă rezoluție de pe Mars Reconnaissance Orbiter sau ai avut șansa de a explora noul Google Mars, știi că Marte este plin de cratere, munți, pescăruși și tot felul de terenuri interesante - și periculoase - . Zonele precum acestea cu depozite stratificate, sedimente, fracturare și defectare sunt doar tipul de locuri în care să cauți sursele de metan care se produc pe Marte. Dar este mult prea riscant să trimitem actualul nostru stil de rovers, inclusiv Laboratorul de Știință Mars (2011), pe un teren trădător. Însă inginerii de la JPL, împreună cu studenții de la Institutul de Tehnologie din California, au proiectat și testat un robot versatil, cu masă redusă, care ar putea fi adăugat roverilor mai mari precum MSL, care pot rapela stâncile, să călătorească pe un teren abrupt și stâncos și să exploreze cratere adânci.
Acest prototip rover, numit Axel, ar putea ajuta viitoarele nave spațiale robotizate să exploreze și să cerceteze mai bine lumi străine precum Marte. Pe Pământ, Axel ar putea ajuta în operațiuni de căutare și salvare.
"Axel extinde capacitatea noastră de a explora terenuri pe care nu le-am putut explora în trecut, cum ar fi craterele adânci cu promontorii cu înclinare verticală", a declarat investigatorul principal al Axel, Issa A. D. Nesnas, din secția de robotică și mobilitate a JPL. „De asemenea, deoarece Axel are o masă relativ scăzută, o misiune poate duce o serie de rover Axel. Asta ne-ar oferi posibilitatea de a fi mai agresivi cu terenul pe care l-am explora, păstrând în același timp riscul general gestionabil. "
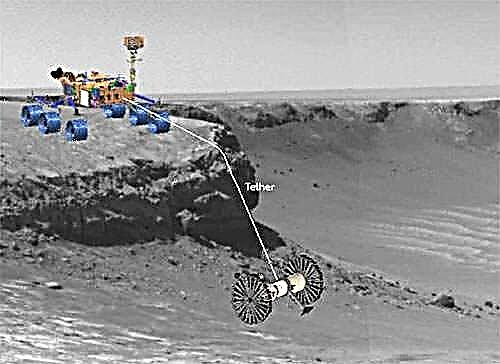
Nesnas a spus că Axel este ca un yo-yo - este pe o legătură atașată la un rover mai mare și poate merge în sus și în jos pe laturile craterelor, canioanelor și pescărușilor, explorând regiuni care nu sunt sigure pentru alți rover.

Designul simplu și elegant al Axel, care poate funcționa atât în sus, cât și pe partea dreaptă în sus, folosește doar trei motoare: unul pentru a controla fiecare dintre cele două roți ale sale și un al treilea pentru a controla o pârghie. Pârghia conține o schemă pentru a aduna materialul lunar sau planetar, pentru ca oamenii de știință să studieze, și ajustează și cele două camere stereo ale robotului, care pot înclina 360 de grade.

Corpul cilindric al Axel are capacități de calcul și comunicații wireless și un senzor inerțial care funcționează autonom. De asemenea, are o legătură pe care Axel o poate dezlega pentru a coborî dintr-un pământ, un rover sau un punct de ancorare mai mare. Rover-ul poate folosi diferite tipuri de roți, de la roți pliabile mari până la cele gonflabile, care ajută roverul să tolereze o aterizare dură și să gestioneze un teren stâncos.
Axel este în dezvoltare din 1999, iar studenții de la Caltech, Universitatea Purdue și Arkansas Tech University au colaborat de-a lungul anilor pentru a dezvolta acest versatil rover.
Pentru mai multe informații despre Axel, consultați pagina Axel a JPL și site-ul web al lui Caltech Axel.